详解寻路算法(2)-生成图
1. 引言
上篇文章 中主要讲解了 A* 算法. 然而 A* 算法只是一个图搜索算法, 我们在游戏中的地图通常是用一些不规则图形定义的一片行走区域, A* 算法并不能识别这样的地图.

因此我们要做的工作就是把一张这样的地图抽象成可用邻接矩阵或邻接链表表示的数学上的图
2. 可视图(visibility graph)
对于大多数地图来说, 我们可以看成由一个无限大的行走区域和若干个障碍物组成; 为了简化问题, 障碍物通常都可以看做多边形. 如下图所示:
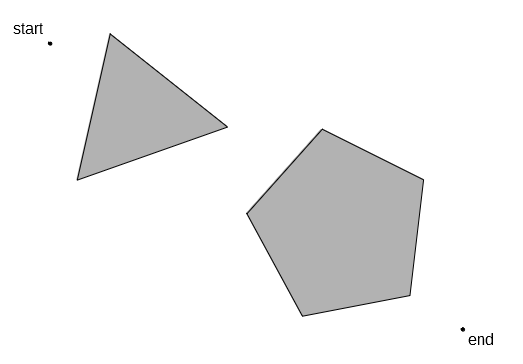
想象我们处于起始点, 要绕过障碍物到达目标点. 当我们绕过障碍物时, 最短的方式应该是贴着障碍物的边缘走:
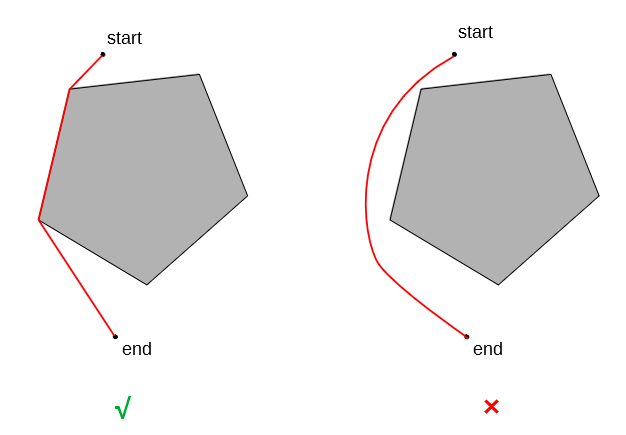
所以我们选择多边形的各个顶点, 我们称之为导航点(navigation points); 同时, 因为起始点和终止点也是寻路中要用到的关键点, 所以它们也属于导航点.
现在我们尝试通过导航点构造出图. 具体的做法是, 对于任意一对导航点 u, v, 如果互相能够 “看见” 对方, 就连接这两个两个点. 所谓的 “看见” 就是, 连接两点, 连线不与任何障碍物相交. 如下图所示:
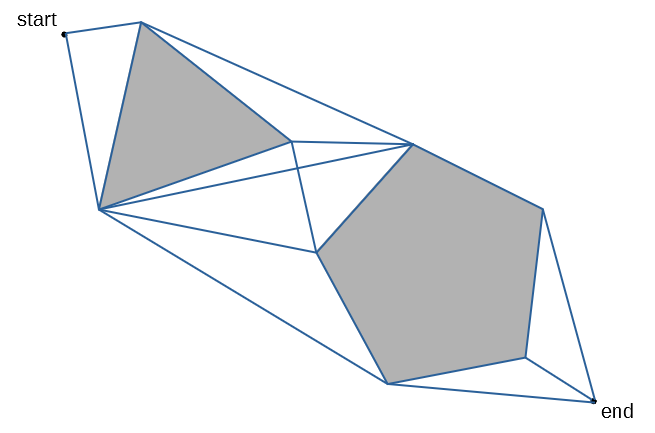
这样, 我们就构造出了一张可视图(visibility graph). 我们把地图抽象成了数学上的图
可视图虽然可以把地图抽象成图, 但也有一定的问题. 最大的问题是, 当多边形过于复杂, 顶点过多时, 可视图算法会生成大量的边. 假设有 n 个导航点, 那么边的数量将会是
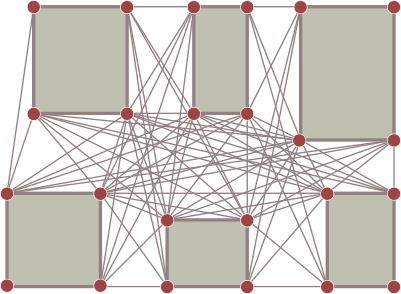 > 图片源自 Map representations
> 图片源自 Map representations
另外一个问题是, 由于起始点和目标点都是导航点, 所以在每次寻路开始时都需要把起始点和终止点加入图中, 并且构造出必要的边; 在寻路结束时又要把他们删除掉. 这都会在地图过大或过复杂时导致算法运行缓慢.
3. 导航网络(Navigation Meshes)
与考虑障碍物的可视图不同, 导航网络考虑的是可行走区域. 对于一个地图, 我们把它看做由若干个多边形相接组成的可行走区域. 如下图所示:
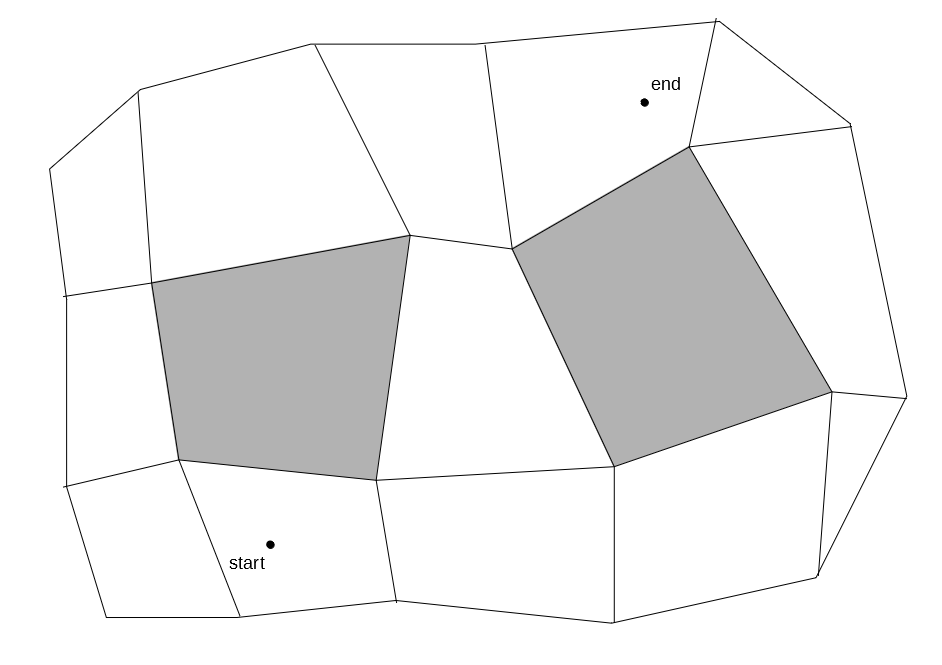
同样地, 绕过障碍物时, 最短的方式一定是贴着障碍物的边缘走. 因此在导航网络里, 我们同样选择各个多边形的顶点作为导航点. 当然, 起始点和终止点也同样是导航点, 我们需要把起始点或终止点和其所在的多边形的各个顶点连接起来, 除此之外, 不需要增加其他的边. 如图所示:
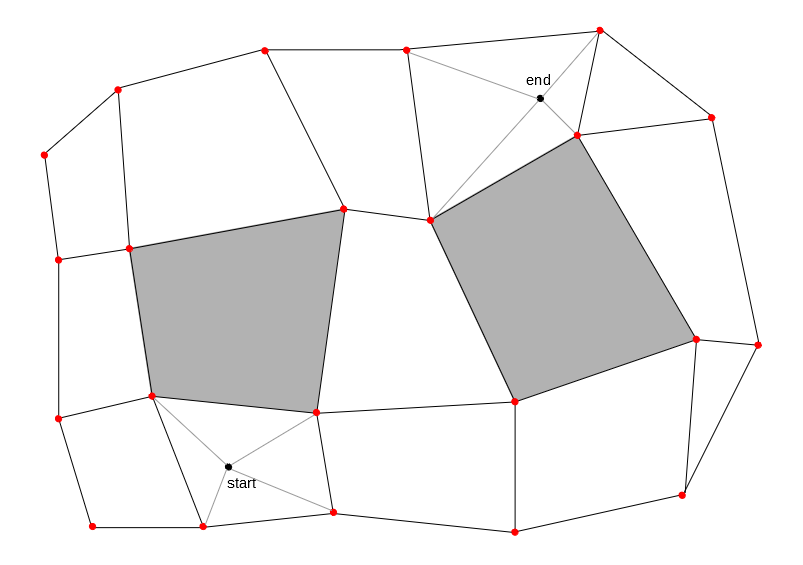
这样我们就把地图抽象成了数学上的图. 可以看到, 导航网络生成的图的边比可视图少了很多, 把这张图应用 A* 算法试试:
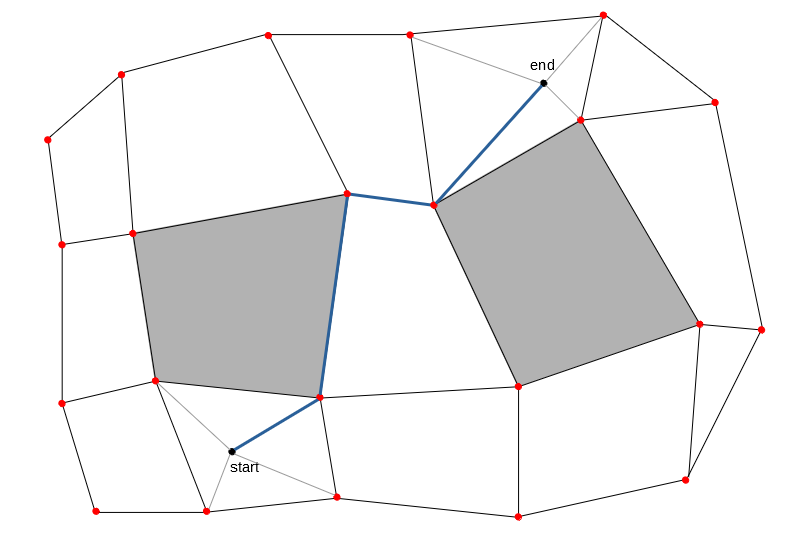
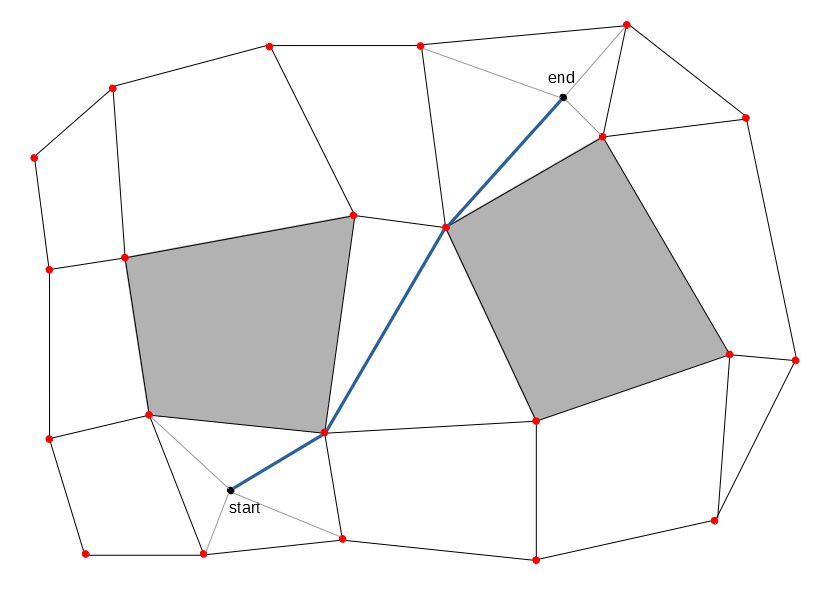
呃, 似乎不太对, 最短路径可不应该是这样的! 不用担心, 我们可以用一个很简单的操作优化它. 对于路径中的第 i 个顶点, 如果它能够看见第 i + 2 个顶点, 就移除第 i + 1 个顶点. 这里的 “看见” 同样是两点连线不与任何障碍物相交. 我们对路径中的每个点都执行这样的操作. 这个操作被称为路径平滑(Path smoothing). 执行完平滑操作后的路径就是这样的:
使用导航网络生成的图的边更少, 起始点和终止点加入图时创建的边也更少, 算法的速度会更快. 然而导航网络也有它的问题: 它是一个 “爬墙怪”, 总是寻找沿墙走最短的路径然后进行平滑. 这在某些特殊的情况下不能保证最短路径. 这种情况我们通常可以通过增加导航点, 或者细分多边形来避免. 但是这样一来生成的图的边又会更多, 算法会更慢.
4. 总结
本文介绍了两种生成图算法. 把一张地图生成图, 在使用图搜索算法对其进行搜索, 就可以完成寻路. 生成图的算法相对较为复杂, 本文只是讲解其思路, 并未给出实现. 寻路算法实际是一个复杂的算法. 笔者的这两篇文章介绍的算法只能适用于小型地图的寻路, 针对开放性大地图的游戏, 寻路算法还会采用更加高级的策略, 后续的文章中笔者也会作补充. 笔者也建议大家去看参考资料中的教程.
参考资料: - Map representations